|
|

|

|
| e-Pub |
Section: New Results
Decision Making in Multi-Robot Systems
Multi-robot planning in dynamic environments
Multi-Robot Routing (MRR) for evolving missions
Participants : Mihai Popescu, Olivier Simonin, Anne Spalanzani, Fabrice Valois [Inria, Agora team] .
After considering Multi-Robot Patrolling of known targets in 2016 [73], we generalized our work to Dynamic Multi Robot-Routing (DMRR), an instance of continuously adapting the multi-robot target allocation process (MRTA). Target allocation problems have been frequently treated in contexts such as multi-robot rescue operations, exploration, or patrolling, being often formalized as multi-robot routing problems. There are few works addressing dynamic target allocation, such as allocation of previously unknown targets. However, existent solutions do not regard the continuous adaptation of the ongoing robot missions to new targets. These techniques are neither adapted to handle the missions growth in time (nor a possible saturation bound for the mission cost). We proposed a framework for dynamically adapting the existent robot missions to new discovered targets. Dynamic saturation-based auctioning (DSAT) is proposed for adapting the execution of robots to the new targets. Comparison was made with algorithms ranging from greedy to auction-based methods with provable sub-optimality. We tested the algorithms on exhaustive sets of inputs. The results for DSAT shows it outperforms state-of-the-art methods, like standard SSI or SSI with regret clearing, especially in optimizing the target allocation w.r.t. the target coverage in time and the robot resource usage (e.g. minimizing the worst mission cost). Results have been submitted to ICAPS 2018.
This work is developped in the PhD. work of M. Popescu, but also through the collaboration (PHC (Hubert Curien Partnership) `DRONEM' project) started in 2017 with the team of Gabriela Czibula from Babes-Bolyai University in Cluj-Napoca (Romania). The project focuses on optimization and online adaptation of the multi-cycle patrolling with machine learning (RL) techniques in order to deal with the arrival of new targets in the environment.
Global-local optimization in autonomous multi-vehicles systems
Participants : Guillaume Bono, Jilles Dibangoye, Laetitia Matignon, Olivier Simonin, Florian Peyreron [VOLVO Group, Lyon] .
This work is part of the PhD. thesis in progress of Guillaume Bono, with the VOLVO Group, in the context of the INSA-VOLVO Chair. The goal of this project is to plan and learn at both global and local levels how to act when facing a vehicle routing problem (VRP). We started with a state-of-the-art paper on vehicle routing problems as it currently stands in the literature [28]. We were surprise to notice that few attention has been devoted to deep reinforcement learning approaches to solving VRP instances. Hence, we investigated our own deep reinforcement learning approach that can help one vehicle to learn how to generalize strategies from solved instances of tralleving salesman problems (an instance of VRPs) to unsolved ones. The difficulty of this problem lies in the fact that its Markov decision process' formulation is intractable, i.e., the number of states grows doubly exponentially with the number of cities to be visited by the salesman. To gain in scalability, we build inspiration on a recent work by DeepMind, which suggests using pointernet, i.e., a novel deep neural network architecture, to address learning problems in which entries are sequences (here cities to be visited) and output are also sequences (here order in which cities should be visited). Preliminary results are encouraging, and we plan to extend this work in the multi-agent setting during the coming year.
Multi-robot coverage and mapping
|

Human scenes observation
Participants : Laetitia Matignon, Olivier Simonin, Stephane d'Alu, Christian Wolf.
Solving complex tasks with a fleet of robots requires to develop generic strategies that can decide in real time (or time-bounded) efficient and cooperative actions. This is particularly challenging in complex real environments. To this end, we explore anytime algorihms and adaptive/learning techniques.
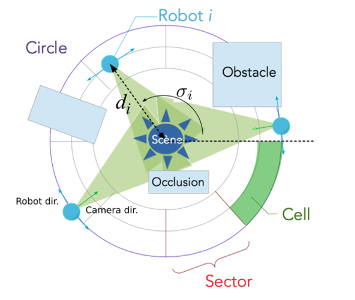
The "CROME" and "COMODYS" (COoperative Multi-robot Observation of DYnamic human poSes) projects (Funded by a LIRIS transversal project in 2016-2017 and a FIL project in 2017-2019 (led by L. Matignon)) are motivated by the exploration of the joint-observation of complex (dynamic) scenes by a fleet of mobile robots. In our current work, the considered scenes are defined as a sequence of activities, performed by a person in a same place. Then, mobile robots have to cooperate to find a spatial configuration around the scene that maximizes the joint observation of the human pose skeleton. It is assumed that the robots can communicate but have no map of the environment and no external localisation.
To attack the problem, we proposed an original concentric navigation model allowing to keep easily each robot camera towards the scene (see fig. 16.a). This model is combined with an incremental mapping of the environment and exploration guided by meta-heuristics in order to limit the complexity of the exploration state space. Results have been submitted to AAMAS'2018 (Multi-Robot Simultaneous Coverage and Mapping of Complex Scene - Comparison of Different Strategies).
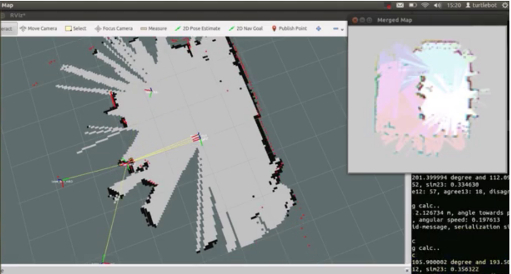
In 2017, we also proposed an hybrid metric-topological mapping for multi-robot observation of a human scene. Robots are individually building a map that is updated cooperatively by exchanging only high-level data between robots, thereby reducing the communication payload. We combined an on-line distributed multi-robot decision with this hybrid mapping. These modules have been implemented and evaluated on our platform composed of several Turtlebots2, see fig. 16.b. Results have been published in 2017 in [21] (ECMR).
Multi-UAV Visual Coverage of Partially Known 3D Surfaces
Participants : Alessandro Renzaglia, Jilles Dibangoye, Olivier Simonin.
It has been largely proved that the use of Unmanned Aerial Vehicles (UAVs) is an efficient and safe way to deploy visual sensor networks in complex environments. In this context, a widely studied problem is the cooperative coverage of a given environment. In a typical scenario, a team of UAVs is called to achieve the mission without a perfect knowledge on the environment and needs to generate the trajectories on-line, based only on the information acquired during the mission through noisy measurements. For this reason, guaranteeing a global optimal solution of the problem is usually impossible. Furthermore, the presence of several constraints on the motion (collision avoidance, dynamics, etc.) as well as from limited energy and computational capabilities, makes this problem particularly challenging.
Depending on the sensing capabilities of the team (number of UAVs, range of on-board sensor, etc.) and the dimension of the environment to cover, different formulations of this problem can be considered. We firstly approached the deployment problem, where the goal is to find the optimal static UAVs configuration from which the visibility of a given region is maximized. A suitable way to tackle this problem is to adopt derivative-free optimization methods based on numerical approximations of the objective function. In 2012, Renzaglia et al. [74] proposed an approach based on a stochastic optimization algorithm to obtain a solution for arbitrary, initially unknown 3D terrains. However, adopting this kind of approaches, the final configuration can be strongly dependent on the initial positions and the system can get stuck in local optima very far from the global solution. We identified that a way to overcome this problem can be found in initializing the optimization with a suitable starting configuration. An a priori partial knowledge on the environment is a fundamental source of information to exploit to this end. The main contribution of our work is thus to add another layer to the optimization scheme in order to exploit this information. This step, based on the concept of Centroidal Voronoi Tessellation, will then play the role of initialization for the on-line, measurement-based local optimizer. The resulting method, taking advantages of the complementary properties of geometric and stochastic optimization, significantly improves the result of the previous approach and notably reduces the probability of a far-to-optimal final configuration. Moreover, the number of iterations necessary for the convergence of the on-line algorithm is also reduced. This work led to a paper submitted to ICRA 2018 (A. Renzaglia, J. Dibangoye and O. Simonin, "Multi-UAV Visual Coverage of Partially Known 3D Surfaces: Voronoi-based Initialization for Stochastic Optimization", IEEE International Conference on Robotics and Automation (ICRA), 2018, under review.), currently under review. The development of a realistic simulation environment based on Gazebo is an important on-going activity in Chroma and will allow us to further test the approach and to prepare the implementation of this algorithm on the real robotic platform available in the team.
We are currently also investigating the dynamic version of this problem, where the information is collected along the trajectories and the environment reconstruction is obtained from the fusion of the total visual data.
Middleware for open multi-robot systems
Participants : Stefan Chitic, Julien Ponge [CITI, Dynamid] , Olivier Simonin.
Multi-robots systems (MRS) require dedicated software tools and models to face the complexity of their design and deployment. In the context of the PhD work of Stefan Chitic, we address service self-discovery and property proofs in an ad-hoc network formed by a fleet of robots. This led us to propose a robotic middleware, SDfR, that is able to provide service discovery, see [44]. In 2017, we defined a tool-chain based on timed automata, called ROSMDB, that offers a framework to formalize and implement multi-robot behaviors and to check some (temporal) properties (both offline and online). S. Chtic will defend his Phd thesis on March 2018.
Sequential decision-making under uncertainty
This research is the follow up of team led by Jilles S. Dibangoye carried out during the last three years, which include foundations of sequential decision making by a group of cooperative or competitive robots or more generally agents.
Optimally solving cooperative and competitive games as continuous Markov decision processes
Participants : Jilles S. Dibangoye, Olivier Buffet [Inria Nancy] , Vincent Thomas [Inria Nancy] , Christopher Amato [Univ. New Hampshire] , François Charpillet [Inria Nancy, Larsen team] .
Our major findings this year include:
-
(Theoretical) – As an extension of [47] in the cooperative case, we characterize the optimal solution of partially observable stochastic games.
-
(Theoretical) – We further exhibit new underlying structures of the optimal solution for both cooperative and non-cooperative settings.
-
(Algorithmic) – We extend a non-trivial procedure for computing such optimal solutions when only an incomplete knowledge about the model is available.
This work proposes a novel theory and algorithms to optimally solving a two-person zero-sum POSGs (zs-POSGs). That is, a general framework for modeling and solving two-person zero-sum games (zs-Games) with imperfect information. Our theory builds upon a proof that the original problem is reducible to a zs-Game—but now with perfect information. In this form, we show that the dynamic programming theory applies. In particular, we extended Bellman equations [40] for zs-POSGs, and coined them maximin (resp. minimax) equations. Even more importantly, we demonstrated Von Neumann & Morgenstern’s minimax theorem [87] [88] holds in zs-POSGs. We further proved that value functions—solutions of maximin (resp. minimax) equations—yield special structures. More specifically, the maximin value functions are convex whereas the minimax value functions are concave. Even more surprisingly, we prove that for a fixed strategy, the optimal value function is linear. Together these findings allow us to extend planning and learning techniques from simpler settings to zs-POSGs. To cope with high-dimensional settings, we also investigated low-dimensional (possibly non-convex) representations of the approximations of the optimal value function. In that direction, we extended algorithms that apply for convex value functions to lipschitz value functions [43].
Learning to act in continuous decentralized partially observable Markov decision process
Participants : Jilles S. Dibangoye, Olivier Buffet [Inria Nancy] , Laëtitia Matignon, Christian Wolf, Guillaume Bono, Jacques Saradaryan, Olivier Simonin, Florian Peyreron.
During the last year, we investigated deep and standard reinforcement learning for solving decentralized partially observable Markov decision processes. Our preliminary results include:
-
(Theoretical) Proofs that the optimal value function is linear in the occupancy-state space, the set of all possible distributions over hidden states and histories.
-
(Algorithmic) Value-based and policy-based (deep) reinforcement learning for common-payoff partially observable stochastic games.
This work addresses a long-standing open problem of Multi-Agent Reinforcement Learning (MARL) in decentralized stochastic control. MARL previously applied to finite decentralized decision making with a focus on team reinforcement learning methods, which at best lead to local optima. In this research, we build on our recent approach [47], which converts the original problem into a continuous-state Markov decision process, allowing knowledge transfer from one setting to the other. In particular, we introduce the first optimal reinforcement learning method for finite cooperative, decentralized stochastic control domains. We achieve significant scalability gains by allowing the latter to feed deep neural networks. Experiments show our approach can learn to act optimally in many finite decentralized stochastic control problems from the literature.